




2026.01.19
GORMで「検索条件が効かない!?」と焦った話。構造体検索の落とし穴と解決策

2019.08.22
導入編Raspberry Piでサーボモーター
こんにちは、またはこんばんは。
最近著しく太ったので、カツカレーのカツなしを食べてる山根です。
今回はサーボモーターを触ってみます。
サーボモーターは任意の角度まで指定して動作させ、指定した角度で止めることができるモーターです。
用途例としては扉の開閉や、産業用ロボットの関節、車型ラジコンのステアリングの制御です。
今回使用するものです
本体上部は、左上のパーツと換装が可能です。(本ページでは「針」と呼んでます)
今回使用するサーボモーターの「SG92R」ですが、可動域が180度までとなっています。
製品によっては360度回転するものもございます。
茶色の線がGND、赤色がVcc(5V)、黄色がPWM(角度を決める信号線)となっています。
図2はサーボモータ一とラズパイを接続している図で、
茶色を2PIN、赤色を6PIN、黄色を7PINに接続しています。
実際に動かしてみましょう。
「図3:ソースコード1」をご覧ください。
これを実行すると、サーボモータに取り付けている針(本体上部のパーツ)が車のワイパーのように0.4秒おきに左右に動きます。
ゼンマイのおもちゃみたいな音を発しながら動きますが、結構な音量です。(業務時間中に動かしてたら、多数の人が見に来ました)
図3に記載している「pi.set~」の第一引数はのラズパイの7PINに差してある部分、「GPIO4」の4を指しております。
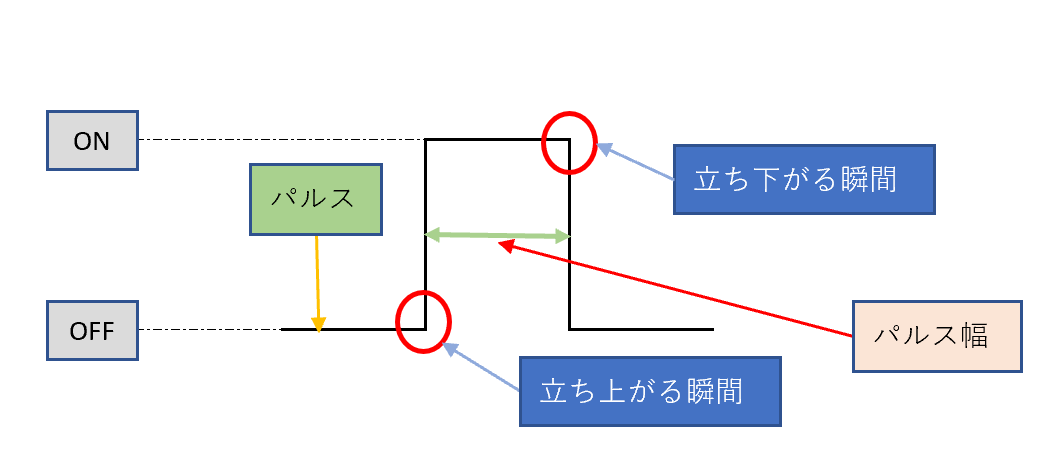
第2引数はパルス幅です。
パルス幅について詳しくないので、端的に言うのは難しいですが、ものすごくラフに言うと(勝手に解釈しました)、
電気信号(パルス)の振動のON/OFF(1か0か)のOFFからONに立ち上がった瞬間からOFFに下がるまでの幅のことを指します。(「図4:パルスの図」参照)
この幅が「540~2450」が角度の「-90~90」度に相当します。
これで動作は確認しましたが、サーボモータを使って何しましょうか。
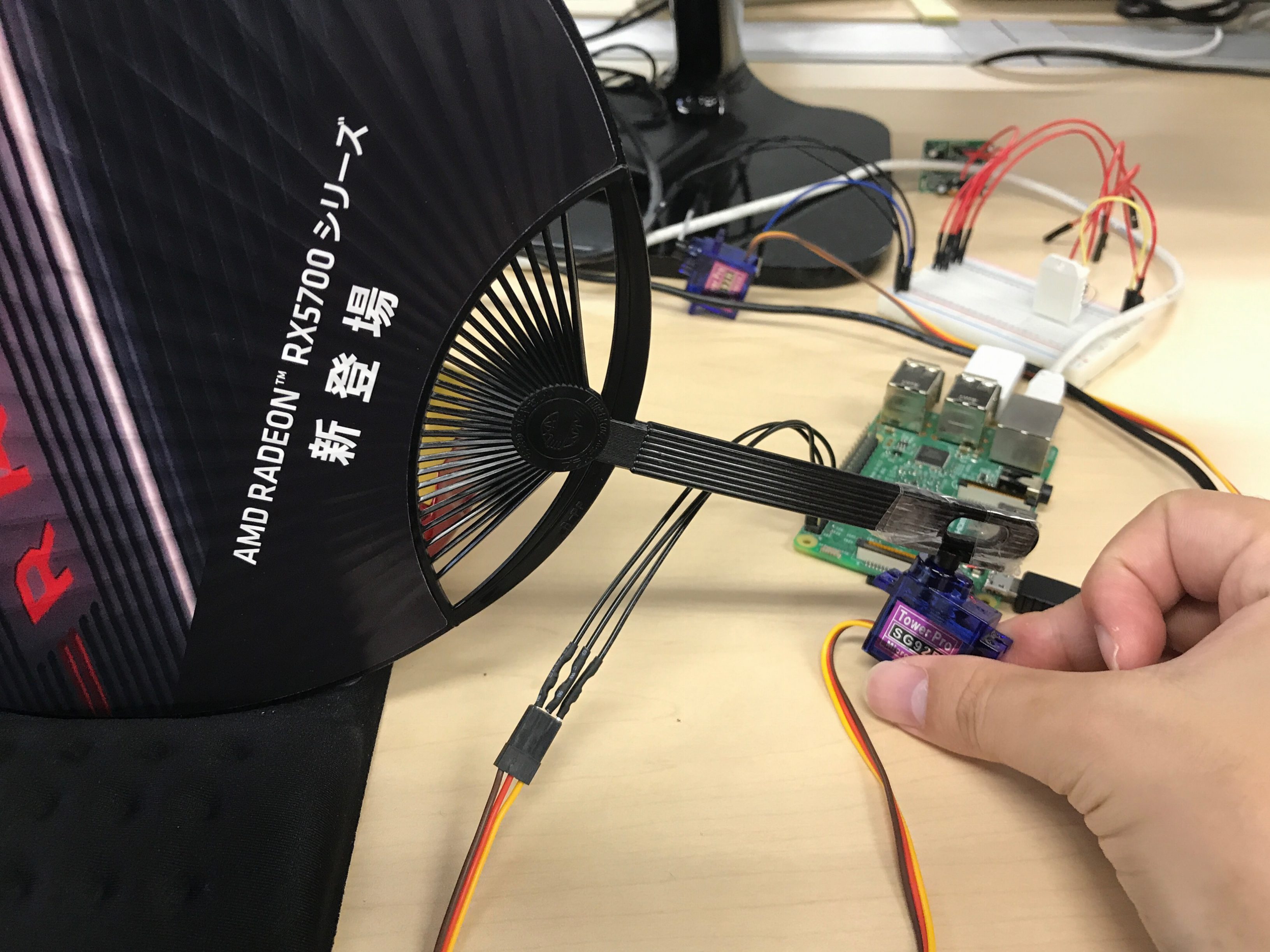
考え付いたのが、机にあった「うちわ」です。
針にうちわをセロテープでくっ付けて、図5を作成しました。
「図3:ソースコード1」の「sleep」を「0.2」に設定し、実行すると、
パタパタ扇いでくれましたが激しいゼンマイ音です。これは扇風機代わりに使えないですね…
さて、身近なものを使った、サーボモータのもっと実用的な(?)遊び方はあるのでしょうか。
【記事への感想募集中!】
記事への感想・ご意見がありましたら、ぜひフォームからご投稿ください!【テクノデジタルではエンジニア/デザイナーを積極採用中です!】
下記項目に1つでも当てはまる方は是非、詳細ページへ!Qangaroo(カンガルー)
【テクノデジタルのインフラサービス】
当社では、多数のサービスの開発実績を活かし、
アプリケーションのパフォーマンスを最大限に引き出すインフラ設計・構築を行います。
AWSなどへのクラウド移行、既存インフラの監視・運用保守も承りますので、ぜひご相談ください。
詳細は下記ページをご覧ください。
最近の記事
タグ検索

